README
DepthViewer
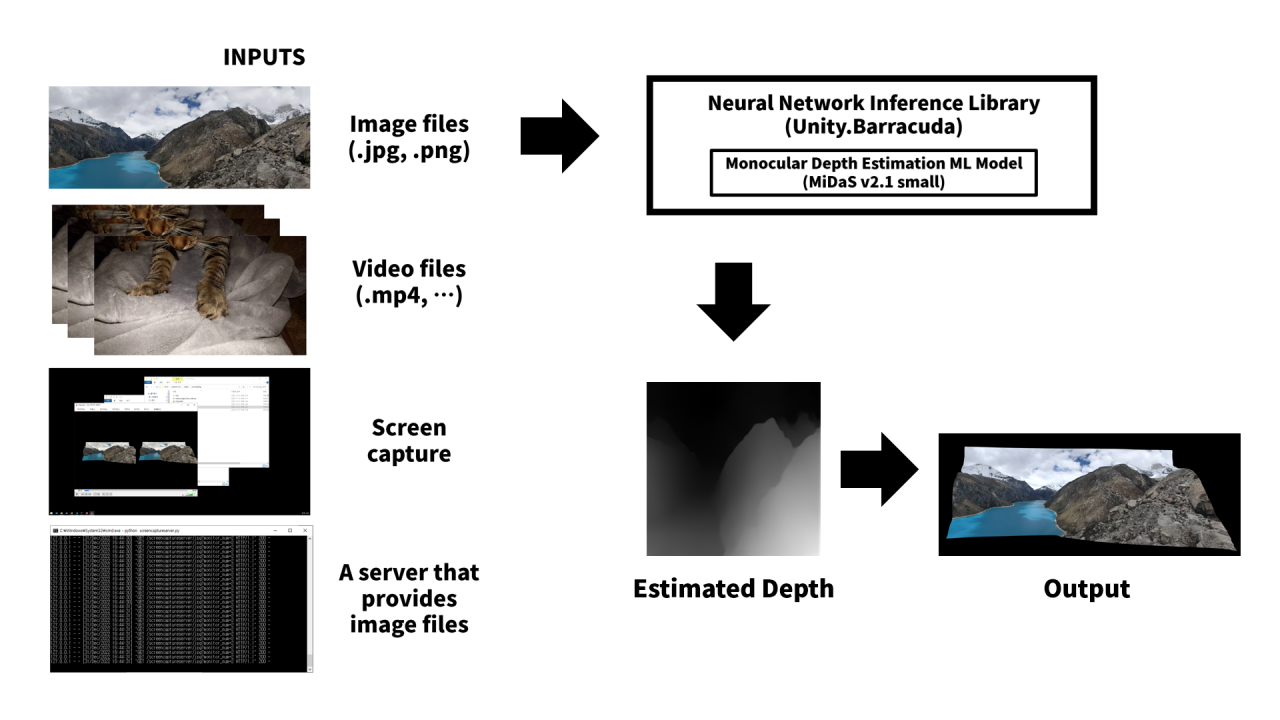
Using MiDaS Machine Learning Model, renders 2D videos/images into 3D object with Unity for VR.
Try Now
Outdated builds (less effective 3D)
Examples
| Original input (resized) | Plotted (MiDaS v2.1) | Projected | Src |
|---|---|---|---|
 |  |  | # |
{kind=link}
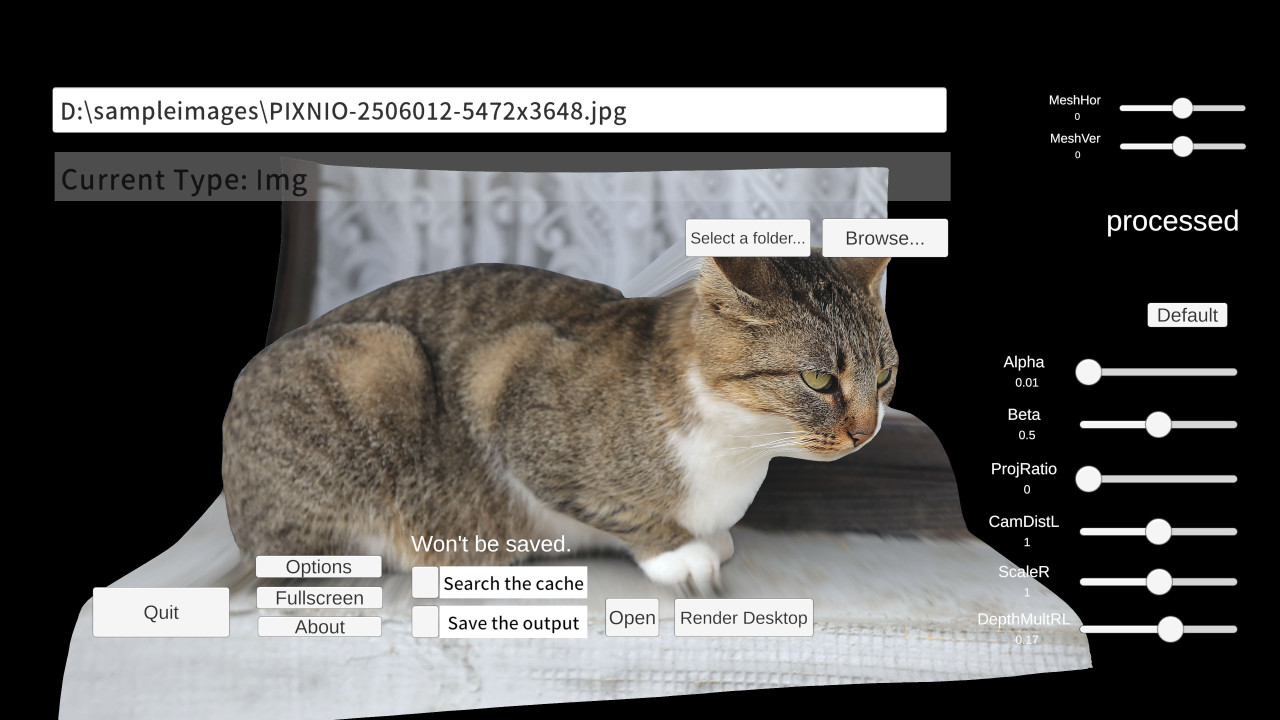
So what is this program?
This program is essentially a depthmap plotter with an integrated depthmap inferer, with VR support.
The depthmaps can be cached to a file so that it can be loaded later.
Inputs
- Right mouse key: hides the UI.
- WASD: rotate the mesh.
- Backtick `: opens the console.
- Numpad 4/5/6: pause/skip the video.
Models
The built-in model is MiDaS v2.1 small model, which is ideal for real-time rendering.
Loading ONNX models
Tested onnx files:
From my experience dpt_hybrid_384 seems to be more robust against drawn images (i.e. non-photos)
- Put the onnx files under the
onnxdirectory. - Open this options menu and select the file and click the
Loadbutton
OnnxRuntime GPU execution providers
Recording 360 VR video
If you select a depthfile and an according image/video, a sequence of .jpg file will be generated in Application.persistentDataPath.
Go to the directory, and execute
ffmpeg -framerate <FRAMERATE> -i %d.jpg <output.mp4>
Where <FRAMERATE> is the original FPS.
To add audio,
ffmpeg -i <source.mp4> -i <output.mp4> -c copy -map 1:v:0 -map 0:a:0 -shortest <output_w_audio.mp4>
Connecting to an image server
The server has to provide a jpg or png bytestring when requested.
Like this program: it captures the screen and returns the jpg file.
I found it to be faster than the built-in one (20fps for 1080p video).
Open the console with the backtick ` key and execute (url is for the project above, targeting the second monitor)
httpinput localhost:5000/screencaptureserver/jpg?monitor_num=2
Importing/Exporting parameters for the mesh
After loading an image or a video while the Save the output toggle is on, enter the console command
e
This saves the current parameters (Scale, ...) into the depthfile so that it can be used later.
Using ZeroMQ + Python + PyTorch/OnnxRuntime
May be unstable.
Implemented after v0.8.11-beta.1.
- Run
DEPTH/depthpy/depthmq.py. (Also see here for its dependencies, pluspyzmqis required) - In the DepthViewer program, open the console and type
zmq 5555.
Use python depthmq.py -h for more options such as port (default: 5555), model (default: dpt_hybrid_384)
To use OnnxRuntime instead of PyTorch, add --runner ort and --ort_ep cuda or --ort_ep dml. For this onnxruntime-gpu or onnxruntime-directml is needed, respectively.
Using ZeroMQ + Python + FFmpeg + PyTorch/OnnxRuntime
Gone are the days of VP9 errors and slow GIF decoding.
Implemented after v0.8.11-beta.2.
- Run
DEPTH/depthpy/ffpymq.py. Also add--optimizefor the float16 optimazation. - In the DepthViewer program, open the console and type
zmq_id 5556. Now all video/GIF inputs are passed to the server and fetches the image and the depth. Usezmq_id -1to disconnect.
Tested formats:
Images
- .jpg
- .png
Videos
- .mp4, ... : Some files can't be played because Unity's VideoPlayer can't open them. (e.g. VP9)
Others
- .gif : Certain formats are not supported.
- .pgm : Can be used as a depthmap (Needs a subsequential image input)
- .depthviewer
Notes
- If VR HMD is detected, it will open with OpenXR.
- All outputs will be cached to
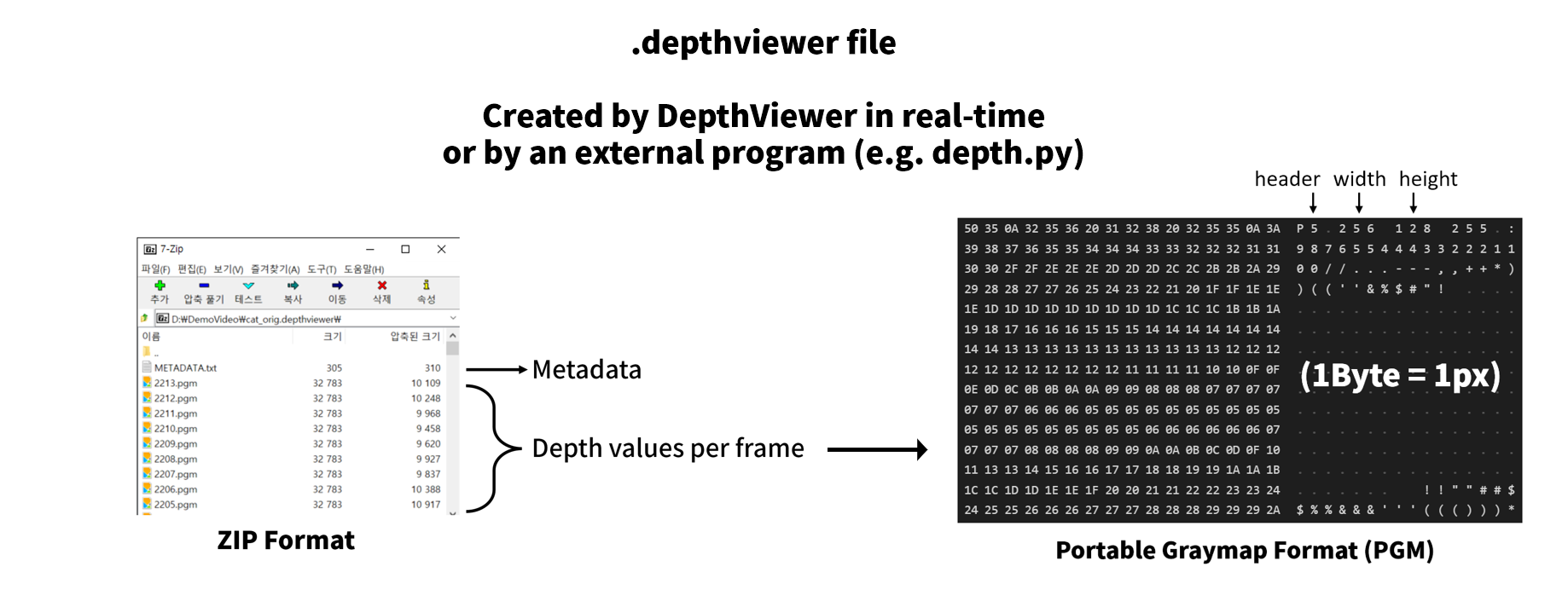
Application.persistentDataPath(In Windows,...\AppData\LocalLow\parkchamchi\DepthViewer). - Depth files this program creates are of extention
.depthviewer, which is a zip file with .pgm files and a metadata file. - To create
.depthviewerfiles using python, see here - Rendering the desktop is only supported in Windows for now.
- C# scripts are in DEPTH/Assets/Scripts.
- Python scripts are in DEPTH/depthpy.
- Also see here
Todo
- Overhaul UI & Control
- Add more options
- Fix codecs
- Stablize
WIP
- VR controllers support (See here)
- Support for the servers that send both the image file and the depthmap
Building
The Unity Editor version used: 2021.3.10f1
ONNX Runtime dll files
- These are added to the repo with Git LFS since
v0.8.9
These dll files have to be in DEPTH/Assets/Plugins/OnnxRuntimeDlls/win-x64.
They are in the nuget package files (.nupkg), get them from
Microsoft.ML.OnnxRuntime.Gpu => microsoft.ml.onnxruntime.gpu.1.13.1.nupkg/runtimes/win-x64/native/*.dll
onnxruntime.dllonnxruntime_providers_shared.dllonnxruntime_providers_cuda.dll- I don't think this is needed:
onnxruntime_providers_tensorrt.dll
Microsoft.ML.OnnxRuntime.Managed => microsoft.ml.onnxruntime.managed.1.13.1.nupkg/lib/netstandard1.1/*.dll
Microsoft.ML.OnnxRuntime.dll
Misc
Libraries used
- MiDaS (MIT License)
@article {Ranftl2022,
author = "Ren\'{e} Ranftl and Katrin Lasinger and David Hafner and Konrad Schindler and Vladlen Koltun",
title = "Towards Robust Monocular Depth Estimation: Mixing Datasets for Zero-Shot Cross-Dataset Transfer",
journal = "IEEE Transactions on Pattern Analysis and Machine Intelligence",
year = "2022",
volume = "44",
number = "3"
}
@article{Ranftl2021,
author = {Ren\'{e} Ranftl and Alexey Bochkovskiy and Vladlen Koltun},
title = {Vision Transformers for Dense Prediction},
journal = {ICCV},
year = {2021},
}
- monocular-depth-unity (MIT License)
- Unity Standalone File Browser (MIT License)
- Unity Simple File Browser (MIT License)
- WebXR Export (Apache License 2.0)
- Google Cardboard XR Plugin for Unity (Apache License 2.0)
- UniGif (MIT License)
- ONNX Runtime (MIT License)
- In-game Debug Console for Unity 3D (MIT License)
- Pcx - Point Cloud Importer/Renderer for Unity (The Unlicense)
- GaussianBlur (MIT License)
- NetMQ (LGPL)
- AsyncIO (MPL 2.0)
- NaCl.net (MPL 2.0)
For Python scripts only:
@misc{https://doi.org/10.48550/arxiv.2302.12288,
doi = {10.48550/ARXIV.2302.12288},
url = {https://arxiv.org/abs/2302.12288},
author = {Bhat, Shariq Farooq and Birkl, Reiner and Wofk, Diana and Wonka, Peter and Müller, Matthias},
keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences},
title = {ZoeDepth: Zero-shot Transfer by Combining Relative and Metric Depth},
publisher = {arXiv},
year = {2023},
copyright = {arXiv.org perpetual, non-exclusive license}
}
- Depth-Anything (Apache License 2.0)
@article{depthanything,
title={Depth Anything: Unleashing the Power of Large-Scale Unlabeled Data},
author={Yang, Lihe and Kang, Bingyi and Huang, Zilong and Xu, Xiaogang and Feng, Jiashi and Zhao, Hengshuang},
journal={arXiv:2401.10891},
year={2024}
}
- Depth Anything ONNX (Apache-2.0 license)
Misc
- Font used: Noto Sans KR (SIL Open Font License)
- Readme file
Also check out
- This project was inspired by VRin
- godot-midas-depth
Remarks
2023 March 9
This project was started in September 2022 with primary goal of using monocualar depth estimation ML model for VR headsets.
I could not find any existing programs that fit this need, except for a closed-source program VRin (link above).
That program (then and still in Alpha 0.2) was the main inspiration for this project, but I needed more features like image inputs, other models, etc.
As it was closed source, I grabbed a Unity/C# book and started to generate a mesh from script.
I gradually added features by trial-and-error rather than through planned development, which made the code a bit messy, and many parts of this program could have been better. But after a series of progressions, I found the v0.8.7 build to be okay enough for my personal use. So this project is on "indefinite hiatus" from now on, but I'm still open for minor feature requests and bug fixes.
I thank all people who gave me compliments, advices, bug reports, and criticisms.
Thank you.
Chanjin Park parkchamchi@gmail.com
2023 March 21
I'll be still updating this project, it can be slow since the school has started again.